NXP 是什么让 i.MX RT 能完美支持多电机控制?
解读ADC_ETC
ADC_ETC配置灵活、可扩展性强,配合2个ADC可以完美胜任多次并行模拟量采样的任务。虽然它是新外设,但是理解起来并不困难,从名字便可顾名思义:它就是一个ADC的控制器,操控ADC完成采样并存储采样结果。
下面我们结合官方参考手册中的结构图来解读。
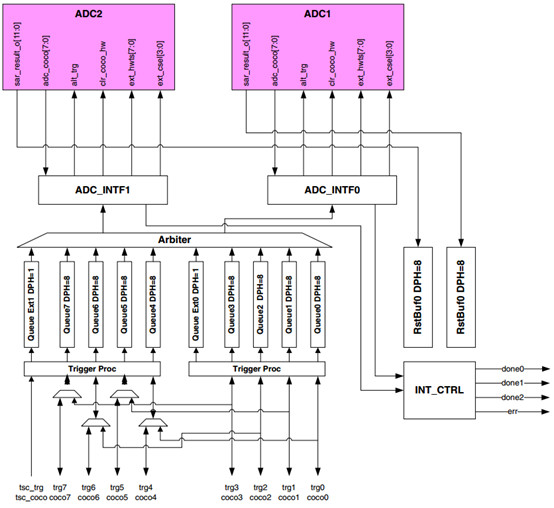
图1. ADC_ETC配合ADC工作的结构图
图1是ADC_ETC配合2个ADC工作的结构图,其中以白色为底色的是属于ADC_ETC的部分。
这张图的信息量还是比较大的,我们挑出几个关键点进行重点介绍:
► 有8组采样控制队列(Queue),每个Queue通过配置可以有0~8个Chain。也就是说,整个ADC_ETC最多有64个Chain。
► Queue 0/1/2/3 只能操控ADC1,Queue 4/5/6/7只能操控ADC2。
► 每个Chain都可以操控ADC对任意一通道完成1次采样、保存1个采样结果,在采样完成后也可以选择是否使能DONE0/DONE1/DONE2这3个中断中的任意一个。
► 每个Queue对应1个触发输入(Trigger IN)。每次Trigger IN信号到来后,对应的Queue将从Chain0开始按顺序连续执行所有的Chains,每个Chain之间可以预设间隔时间。
► 每个Trigger IN都可以通过XBAR链接到PWM的触发信号,且Trigger IN之间可以共用同一个触发源。
► 可配置Trigger IN/Queue的优先级,一共8个优先级。如果操控同一个ADC的Trigger IN/Queue同时被触发,则先执行优先级高的,再执行优先级低的。
此外,ADC_ETC的触发方式有两种模式,如图2所示: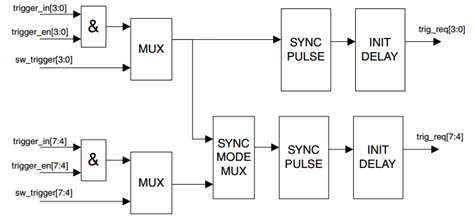
► 异步模式(AsyncMode):
Queue0/1/2/3分别由TRIG0/1/2/3触发,Queue4/5/6/7分别由TRIG4/5/6/7触发。
► 同步模式(SyncMode):
Queue0/4,Queue1/5,Queue2/6,Queue3/7分别由TRIG0/1/2/3同时触发。显然,利用同步模式,可以方便地实现2通道模拟信号的同步并行采样。
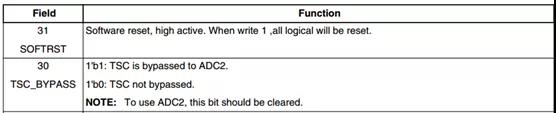
图3. ADC_ETC全局控制寄存器
值得注意的是,在配置ADC_ETC初始化代码时,一定要先按下面的步骤顺序配置ADC_ETC全局控制寄存器(Global Control Register 如图3),之后才能操作ADC_ETC的其他寄存器。
① 单独清零SOFTRST位,否则对其他寄存器的操作将无效。
ADC_ETC->CTRL &=~ADC_ETC_CTRL_SOFTRST_MASK;
② 如果想使用ADC2,则需要清零TSC_BYPASS位,否则ADC2将被TSC占用。
ADC_ETC->CTRL &= ~ADC_ETC_CTRL_TSC_BYPASS_MASK;
在双PMSM/BLDC电机控制中的应用案例
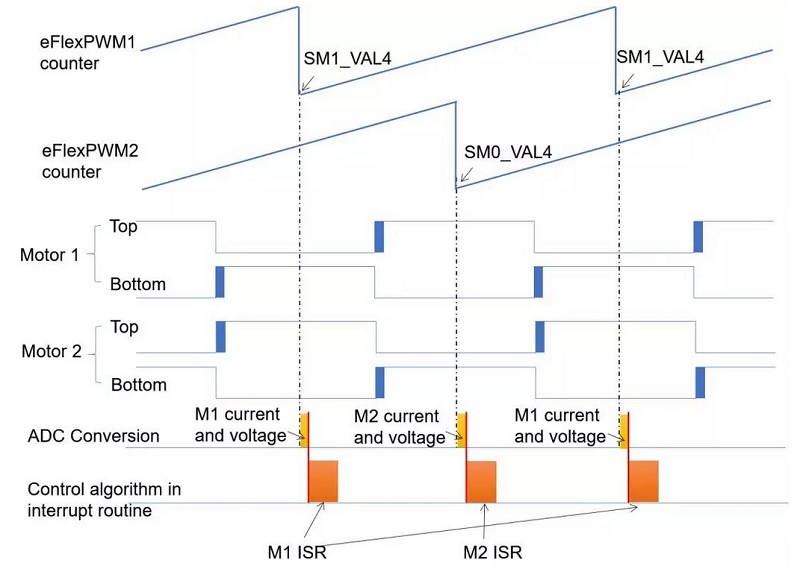
图4. 双PMSM/BLDC电机控制的PWM和ADC时序图
如图4所示,在单芯片同时控制2个PMSM或BLDC电机的应用中,2个电机的PWM相位互差180°(即半个周期),且在PWM周期起始时刻的触发ADC_ETC采样。具体实现方法,可以参考发布在官网的应用笔记AN12200(Dual FOC Servo Motor Control on i.MX RT)。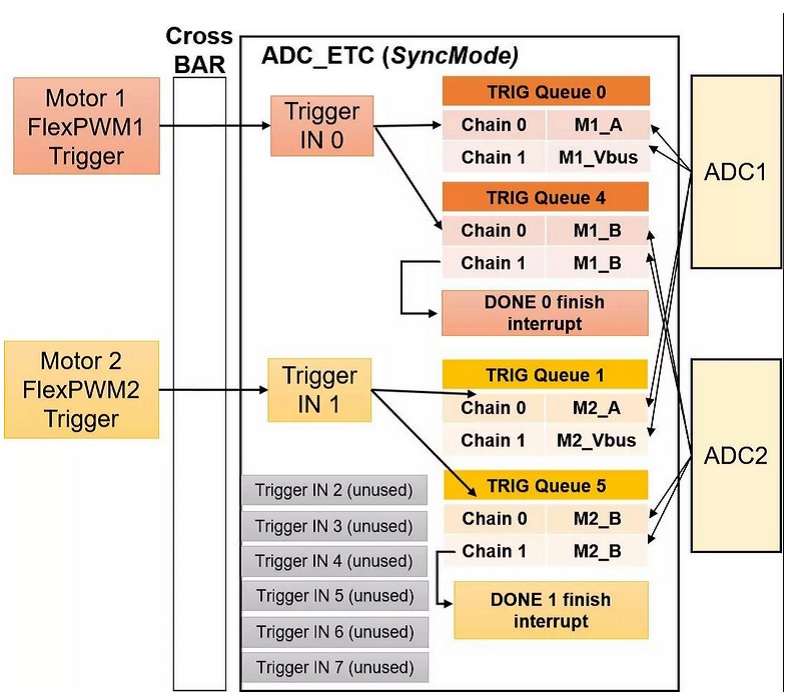
图5. 双PMSM/BLDC电机控制的ADC_ETC配置示意图
双PMSM/BLDC电机的ADC_ETC配置方法,如图5所示。利用XBAR(Cross BAR)将2个PWM的触发信号分别引入Trigger IN0和Trigger IN1。由于配置了同步模式(SyncMode),Trigger IN0同时触发Queue0和Queue4。Queue0和Queue4中Chain0同时分别采样电机1的A相和B相电流,之后顺序执行各自Chain1的采样。在Queue4的Chain1采样完成之后,触发DONE0中断,在此中断中执行电机1的控制算法。Queue1和Queue5对电机2采样过程与上述电机1的类似。
在4个步进电机控制中的应用案例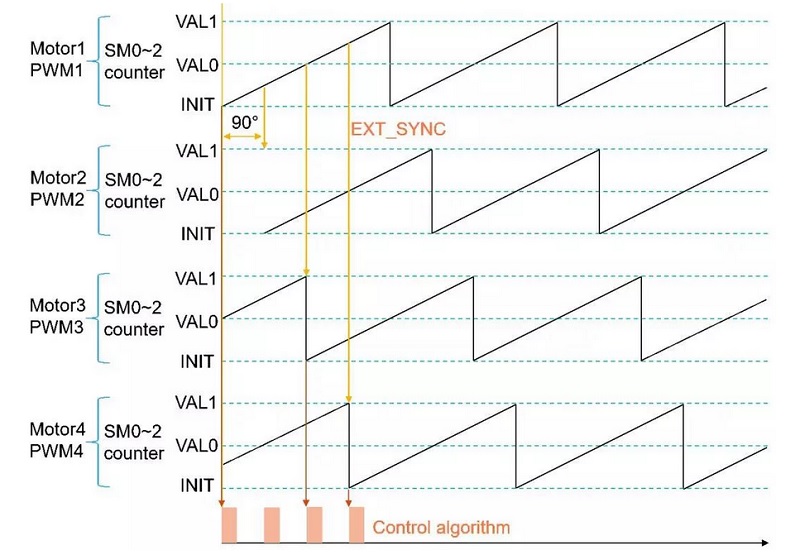
图6. 4个步进电机的PWM时序图
如图6所示,在4个步进电机控制中,PWM互差90°(1/4周期),在PWM的起始时刻触发ADC_ETC采样。 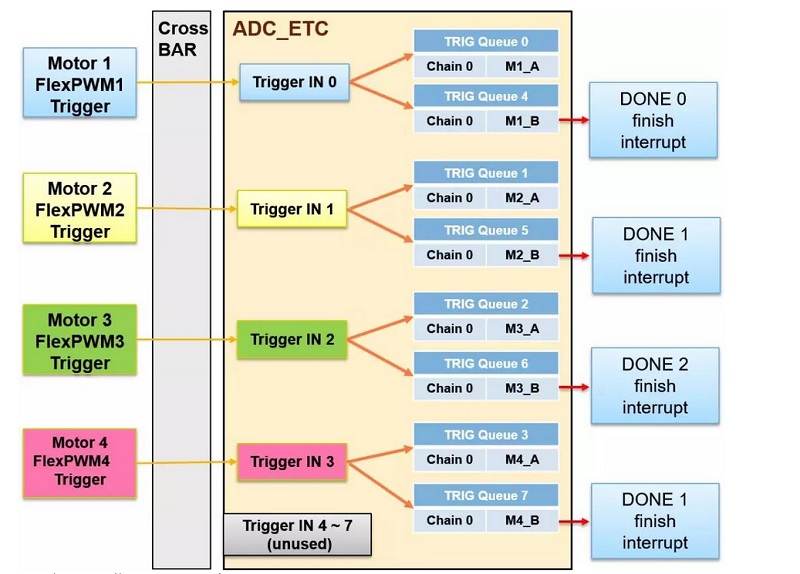
图7. 4个步进电机的ADC_ETC配置示意图
4个步进电机控制中的ADC_ETC配置方法,如图7所示。利用XBAR(Cross BAR)分别将4个PWM的触发信号分别引入Trigger IN0、Trigger IN1、Trigger IN2、Trigger IN3。由于配置了同步模式(SyncMode),Trigger IN0同时触发Queue0和Queue4。Queue0和Queue4中Chain0同时分别采样电机1的A相和B相电流。之后在Queue4的Chain0采样完成之后,触发DONE0中断,在此中断中执行电机1的控制算法。
针对电机2/3/4的配置和电机1的类似。
需要注意的是,由于ADC_ETC中只有3个转换完成中断可选,所以这个案例中电机2和电机4共用同一个DONE1中断,需要在中断服务程序中根据DONE0_1_IRQ寄存器中的标志进行判断,用来区分当前中断是由Trigger IN1和Trigger IN3二者中哪一个触发的,这样就可以知道当前应该执行电机2还是电机4的控制算法。
在PMSM伺服+步进伺服中的应用案例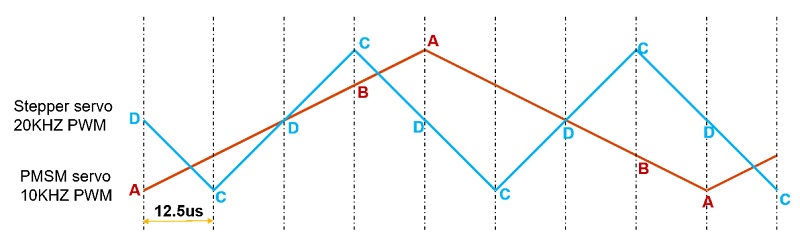
图8. PMSM伺服+步进伺服的PWM时序
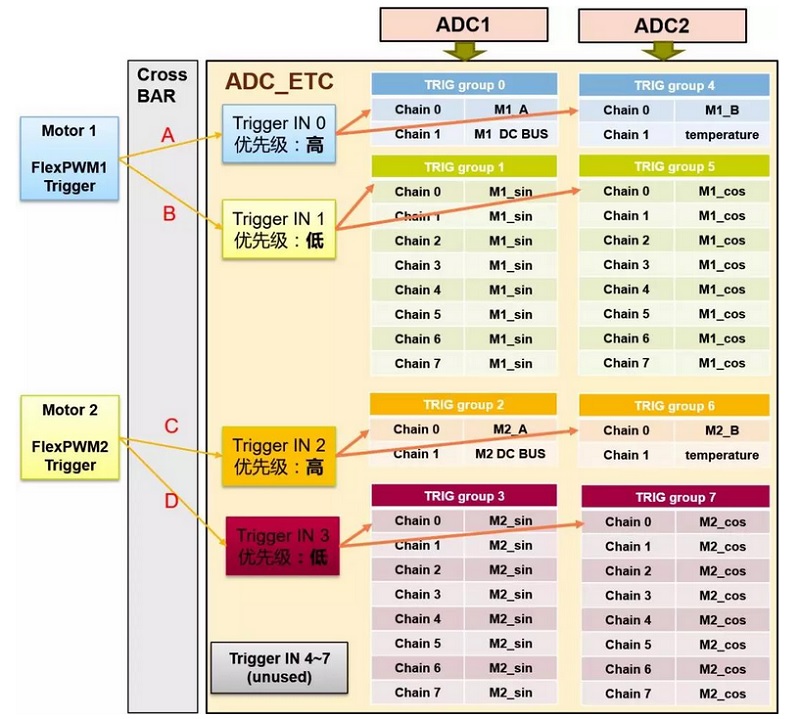
图9. PMSM伺服+步进伺服的ADC_ETC配置示意图
图8和图9展示了一种双电机应用,其中一个是PMSM伺服,PWM频率是10Khz;另一个是步进伺服,PWM频率是20Khz。2个电机都使用磁角度传感器作为位置传感器,该磁角度传感器输出一对与磁场角度成正弦和馀弦关系的电压信号,所以需要对这对电压信号进行连续多次采样。
-
A点:触发优先级为高,采集PMSM伺服电机的2相电流、母线电压和温度,之后使能中断,执行PMSM伺服控制算法。
-
B点:触发优先级为低,采集PMSM伺服电机的磁角度传感器的一对电压信号,连续采集8次。
-
C点:触发优先级为高,采集步进伺服电机的2相电流、母线电压和温度,之后使能中断,执行步进伺服控制算法
-
D点:触发优先级为低,采集步进伺服电机的磁角度传感器的一对电压信号,连续采集8次。
在这个案例中,ADC_ETC的优势充分展现:
-
具有触发优先级控制的能力:A和D、B和C共享同一个触发源,且会出现同时被触发的情况,通过优先级控制,优先执行相电流采样,再执行磁角度传感器采样。
-
具有强大的连续采样能力和丰富的采样结果寄存器:可以连续采集8对信号,并且保存在各自的寄存器中。
更多恩智浦AI-IoT市场和产品信息,邀您同时关注“NXP客栈”微信公众号![]()
- 2019-05-29东芝光继电器通过UL508认证其适用于工控设备
- 2018-02-07东芝推出新蓝牙低功耗5.0版通用IC 轻松实现高效率远距离传输
- 2016-04-13Toshiba东芝推出搭载业界首款1.5汲极输出驱动器的DMOS FET晶体管数组
- 2016-04-13 Toshiba东芝推出15W无线充电发射器IC
- 2016-04-13AMS奥地利微电子推出47系列新款磁性位置传感器